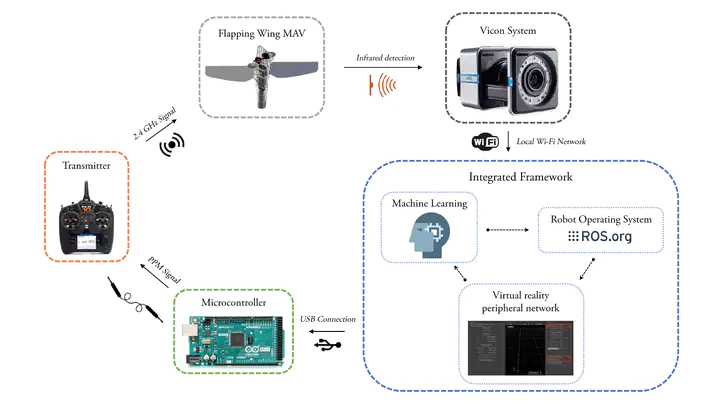
This Project hosts the ROS Workspace for a closed loop control system that uses Deep RL (DDPG) to teach a real physical flapping wing MAV to fly. This workspace was created in ROS Melodic (Ubuntu 18.04)
All details about the setup and training process can be found in FWMAV_DeepRL_Final.pdf