Projects
*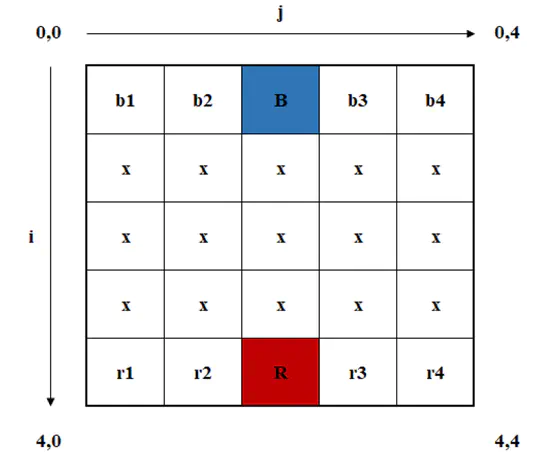

OnitamaAI - An Artificial Intelligence Implementation of the Onitama Board Game
An Artificial Intelligence Learning implementation on the board game Onitama
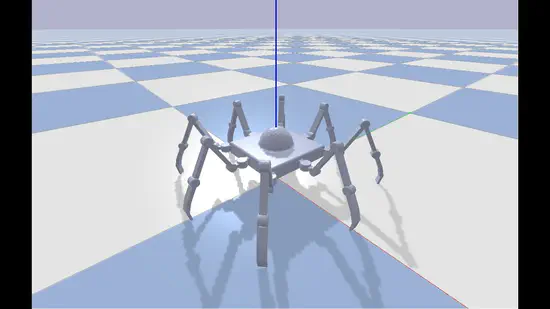
Deep RL for SpiderBot
A custom-designed Spider Robot trained to walk using Deep RL in a PyBullet Simulation
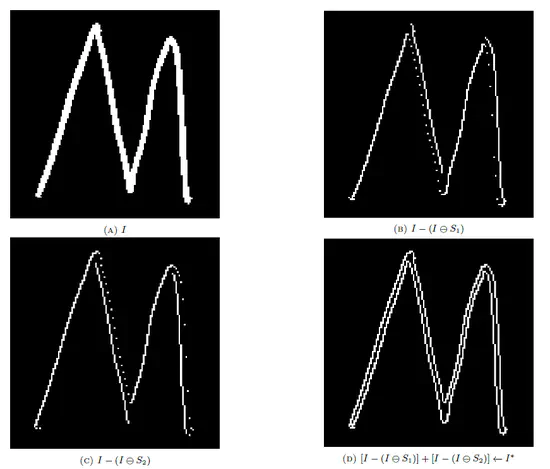
Machine Vision & Image Processing
A full workflow of a series of digital image processing tools written from scratch in MATLAB
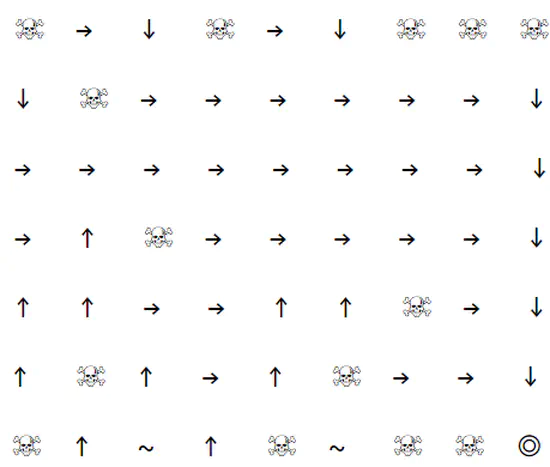
FrozenLake RL
A tabular reinforcement learning approach to a custom & classic gridworld setting
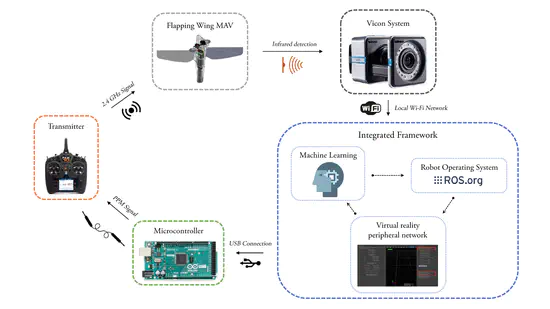
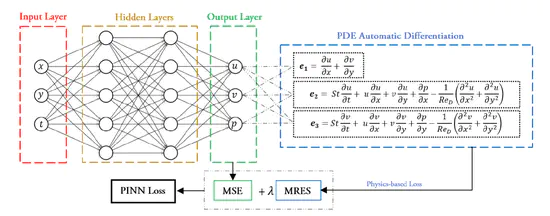
Flapping-Wing MAV Deep RL
A ROS Workspace for a Deep RL approach to teaching a Physical Flapping-Wing MAV to Fly in a controlled environment
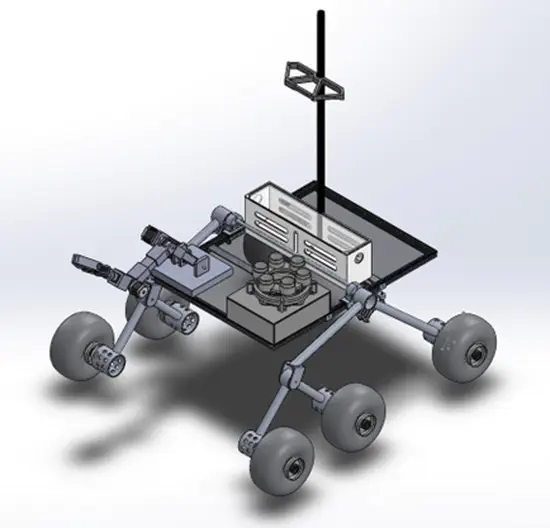
6-Wheel Rocket-Bogie Rover
A rover designed as part of the NUS Mars Rover Team for the University Rover Challenge 2020 (cancelled in lieu of COVID-19)
Folding-Wing Unmanned Aerial Vehicle
A pancake-shaped folding wing unmanned aerial vehicle for AIAA Design, Build, Fly 2019 in Arizona, USA.